Day 3 Recap 2021 Season
Good evening once again! Day 3 of our Robot in 3 Days (Ri3D) event is coming to an end so we wanted to give everyone a recap of our progress from today. If you missed our other blog post recap be sure to check out our Day 1 Recap and Day 2 Recap.
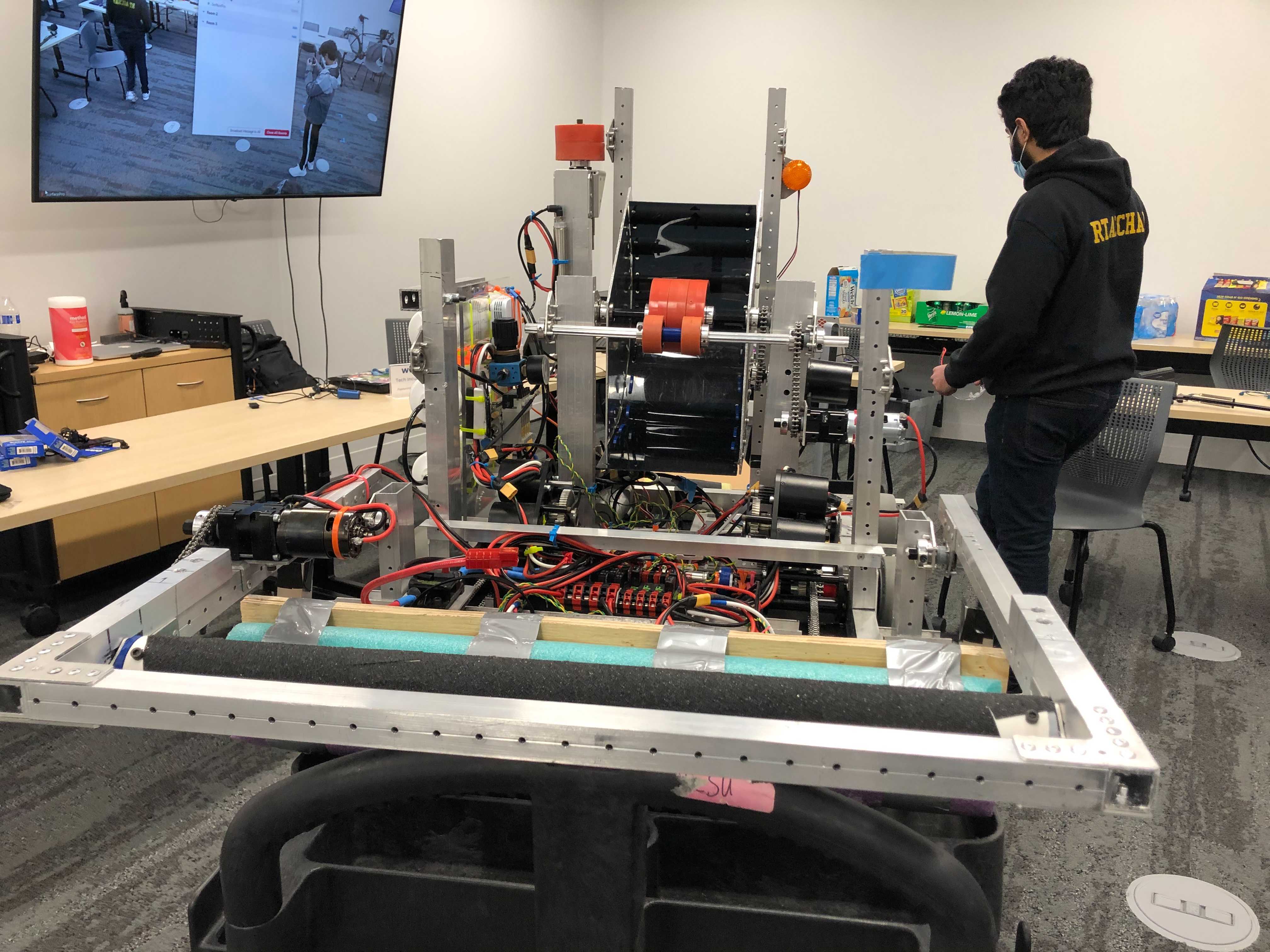
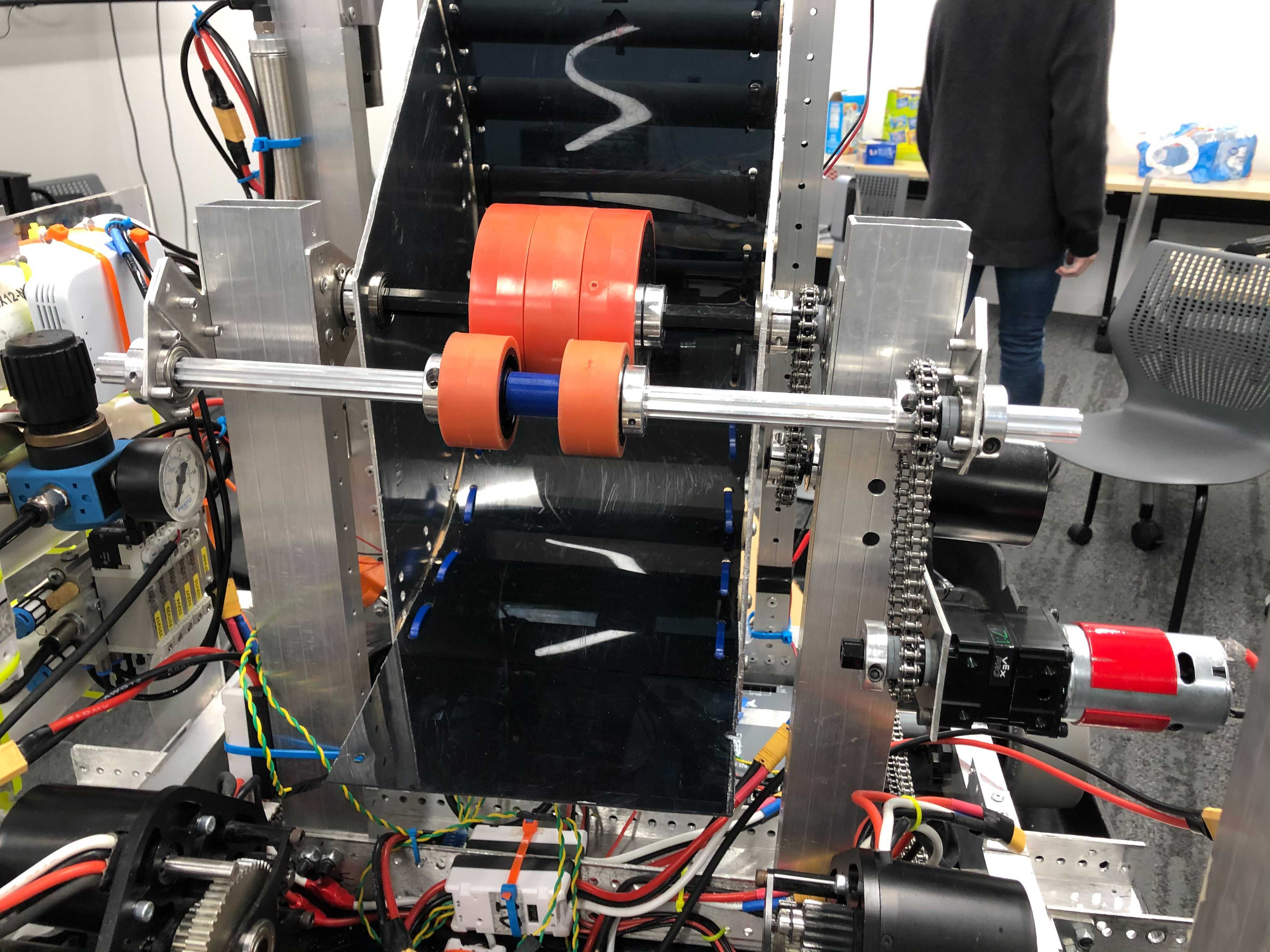
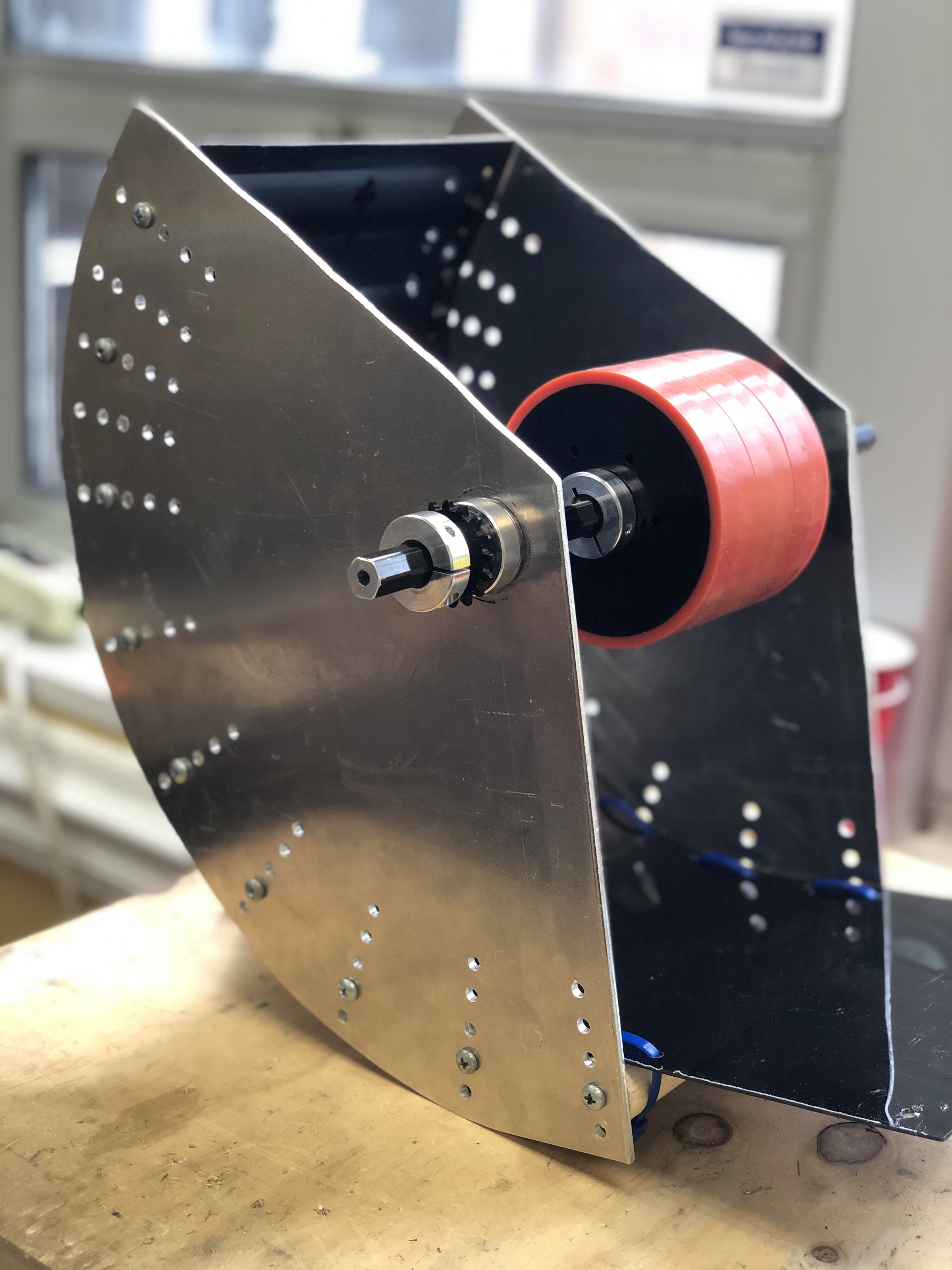
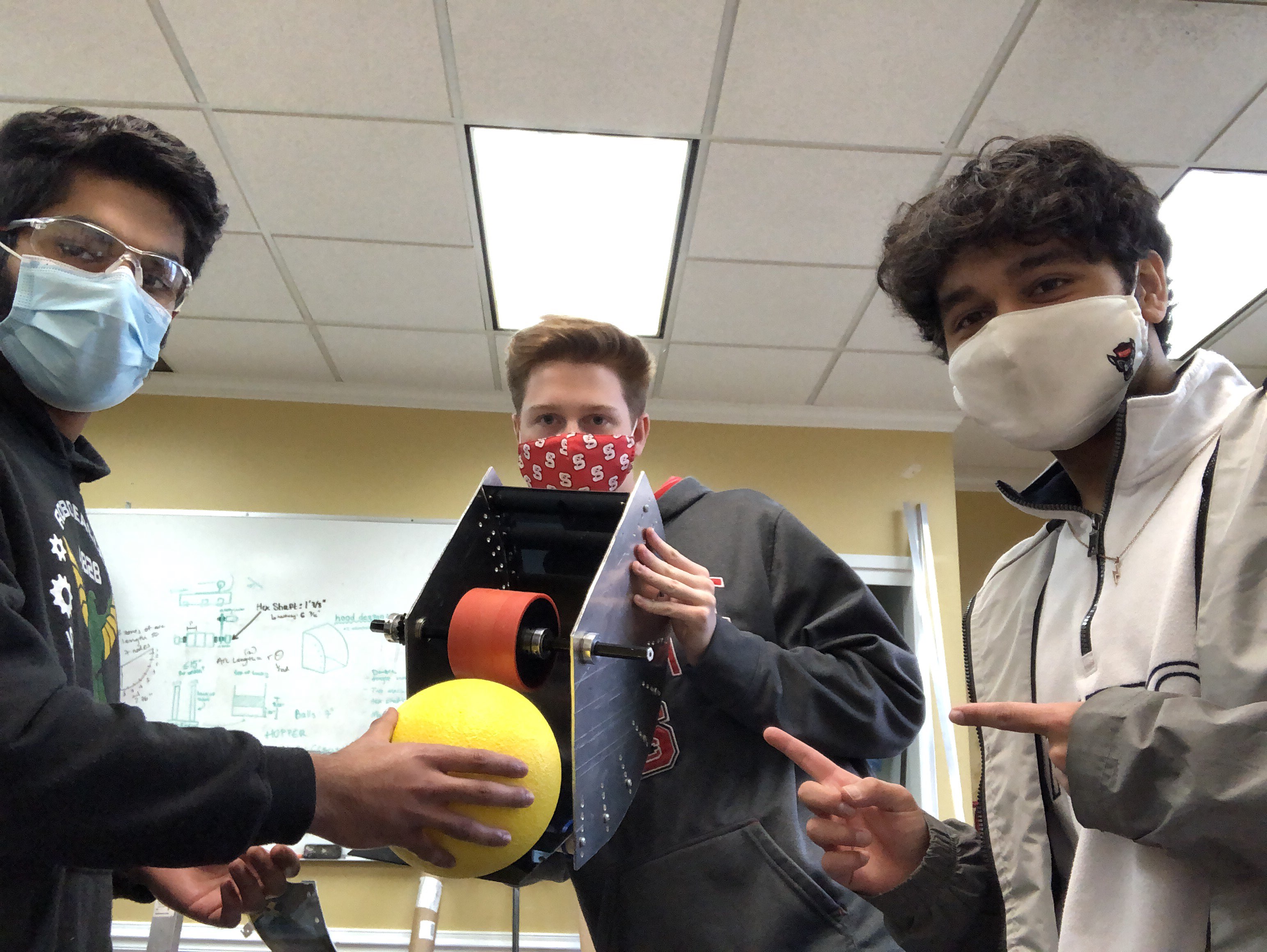
This morning our RoboDogs site team put their finishing touches on the shooter mechanism before handing it off to the eGarage. The RoboDogs site team worked heavily with our CAD team in order to get the dimensions for both the shooter mechanism and the hopper (which our team has dubbed “the Ravine”).
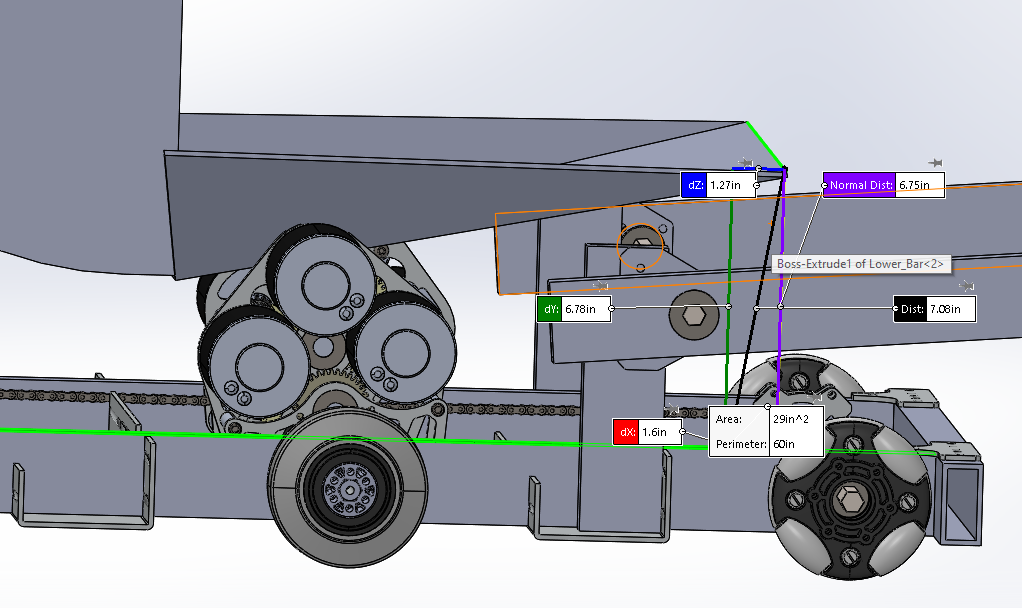
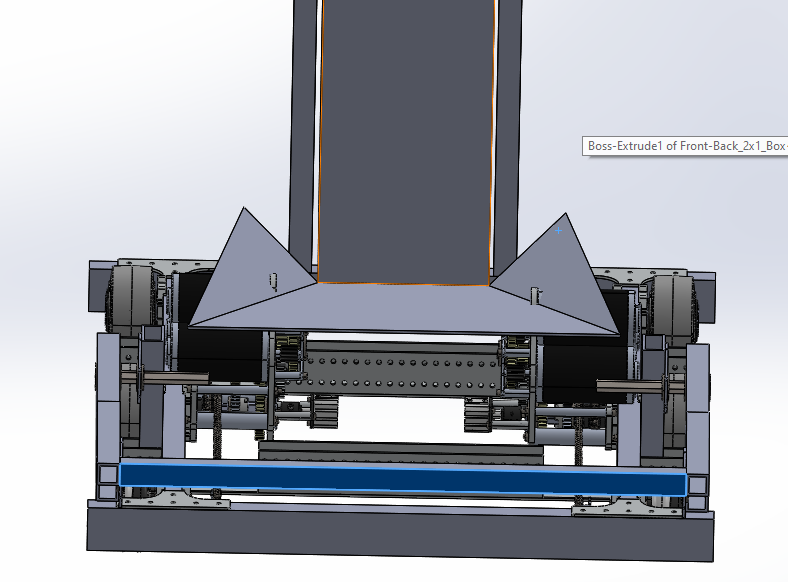
Speaking of the CAD team, they have now finished the drive train and have an accurate model of the robot. The drawings now also have materials that reflect the real materials on the robot, which means we can estimate the weight of the robot. After completing that, they finished the model of the Power Cell shooting mechanism and the Ravine.
While the Robodogs site team was working on putting the final touches on the shooter and designing a mounting system, the programming team was working with the in-person build team at the eGarage. The programming team was able to get a curve following autonomous working in the conference room of the eGarage. The curve for our autonomous is not an official path for the INFINITE RECHARGE at home due to our room’s size constraints. However, the curve following autonomous is a proof of concept and teams can program any path they wish following the same methods.
Additionally, the programming team worked on the code for the Control Panel mechanism. The robot uses pneumatics to actuate this system and then uses a grippy wheel to spin the Control Panel. The programming team had to do a lot of troubleshooting with the build team to get this to work, but now it works almost perfectly. Both the in-person build team at the eGarage and the virtual programming team utilized zoom to work together and make the Control Panel mechanism come to life.
The team made great progress and they are still on track to meet their goals and finish strong by 1:00pm EST tomorrow. Be sure to follow the team’s progress in the final hours tomorrow starting at 9:00am EST on twitch.tv/fullmoonrobotics.
eGarage:
Helped programming test and troubleshoot pneumatic system
Attached the shooter
Started prototyping the hopper mechanism
Fixing the wiring of the shooter.
Programming:
Got autonomous running
Tuning a bunch of numbers and debugging.
What does auto do? Curve following (trajectory)
Got the intake working
Control Panel game element works
Troubleshot and fixed the pneumatic system with eGarage
Currently working on shooter
RoboDogs:
Assemble the shooter
Brought the assembled shooter to the eGarage
Worked on a mounting mechanism for the shooter
Worked with CAD team to design the hopper
CAD:
Wrapped up the drivetrain modeling
Got the shooter CAD-ed
Prototyping the hopper mechanism in CAD
Been going through multiple design iterations
Decided on the “ravine” with high sides and different angles to allow for gravity to iterate the power cells into the shooter.
Content:
Wrote and posted 3 (4 including this one!) blog posts
Created and posted 4 social media posts
Edited, re-edited, and posted 1 YouTube video